智能化堅果去殼機結構設計與數字化建模
隨著食品加工行業對自動化、智能化設備需求的不斷提升,堅果去殼機作為關鍵加工設備,其結構設計與技術集成正邁向新的發展階段。本文主要闡述一種智能化堅果去殼機的整體結構設計思路,并涵蓋其CAD二維工程圖(零件圖與裝配圖)以及Pro/ENGINEER三維建模的關鍵內容,為同類智能化設備及配件的設計提供參考。
一、 總體結構與工作原理設計
該智能化堅果去殼機采用模塊化設計理念,主要由上料模塊、輸送與分選模塊、核心去殼模塊、殼仁分離模塊、智能控制模塊及出料模塊構成。其核心創新在于集成了機器視覺識別與負壓自適應調節系統。
工作流程如下:混合堅果經振動上料機構均勻送入柔性輸送帶,通過機器視覺系統(集成于輸送模塊上方)快速識別堅果類型(如核桃、巴旦木、夏威夷果等)與尺寸。識別信號傳輸至PLC控制器,控制器隨即調節后續工位的參數。堅果進入核心去殼工位,該工位采用多模式可換執行機構,例如對于核桃采用間歇式滾壓破碎,對于夏威夷果采用定向剪切開口。執行機構的壓力、行程可通過伺服電機與電動推桿精確控制,其設定值由智能控制系統根據視覺識別結果自動匹配最佳工藝數據庫。破碎后的混合物進入殼仁分離室,利用仁與殼的比重、尺寸差異,通過多級振動篩分與負壓氣流吸附實現高效分離。純凈的果仁最終經收集倉輸出。整機運行狀態、產量、故障信息通過HMI人機界面實時顯示與記錄。
二、 關鍵部件結構設計與CAD工程圖
- 自適應滾壓去殼裝置:作為核心部件,其設計重點在于兩對沖壓輥的間隙調節機構。在CAD零件圖中,需詳細標注驅動輥、從動輥的直徑、工作表面硬度處理要求、軸承座安裝尺寸以及調節螺桿的螺紋規格。裝配圖需清晰表達輥間同步齒輪傳動、直線導軌滑塊調節機構以及壓力傳感器的安裝位置,確保間隙可在0-20mm范圍內無極精準調節,公差配合需嚴格標注。
- 負壓殼仁分離器:該部件為鈑金焊接結構。CAD圖紙需包含分離器腔體、多層傾斜篩網、高壓離心風機接口、觀察窗等零件的詳細展開圖與焊接工藝要求。裝配圖需體現篩網的可拆卸卡扣連接方式與氣流導向板的安裝角度,確保氣流均勻通過篩面,將輕質果殼吸走。
- 機器視覺識別支架:為保障相機與照明系統的穩定性,支架采用鋁型材框架結構。零件圖需明確型材截面規格、連接角碼及相機云臺調節座的加工尺寸。裝配圖應展示相機、環形LED光源與振動上料盤之間的相對位置關系,確保視野覆蓋整個輸送帶寬度。
所有CAD圖紙均嚴格遵循《機械制圖國家標準》,包含完整的標題欄、技術要求、材料清單及合理的尺寸、形位公差標注,為后續加工制造提供精確依據。
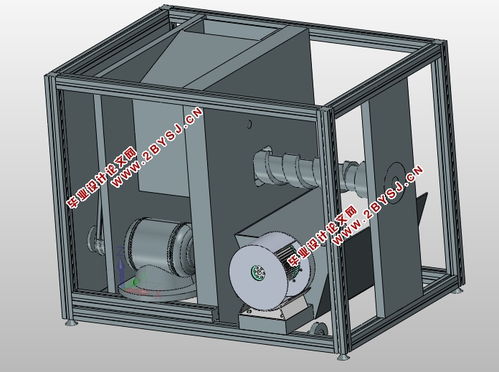
三、 Pro/ENGINEER三維建模與數字化裝配
在Pro/ENGINEER(Creo)環境中進行全參數化三維建模,是驗證設計合理性與進行運動仿真的關鍵步驟。
- 零件建模:對每個功能零件,如機架、傳動軸、齒輪、氣缸安裝板等,依據CAD二維設計尺寸進行實體建模。對復雜曲面部件(如送料滑道)可利用掃描、混合等高級特征構建。所有模型均賦予密度、材質等物理屬性,為后續有限元分析(如對關鍵承力部件進行應力分析)奠定基礎。
- 數字化裝配與運動仿真:將各零件模型按實際約束關系(如對齊、匹配、插入、軸承連接等)進行虛擬裝配,生成整機三維總裝模型。此過程可直觀檢查是否存在干涉,例如檢查滾壓輥在調節過程中是否與機架內側發生碰撞。利用機構模塊對送料連桿機構、篩網振動機構設置驅動電機,進行運動學仿真,驗證其運動軌跡與速度是否符合設計要求。
- 智能化模塊集成示意:在三維模型中,以簡化模型或空間占位符的形式體現PLC控制柜、觸摸屏、傳感器、氣管與線纜橋架的布局,進行初步的電氣布線規劃,確保結構設計與控制系統硬件安裝的協調性。
四、 智能化配件設計要點
- 多傳感器融合:設計集成壓力、位置、光電接近開關等多種傳感器的專用安裝支架與信號線保護套管,確保數據采集的可靠性與設備整潔。
- 執行器選型與接口:根據計算出的負載與速度要求,精確選型伺服電機、步進電機及電動推桿,并在結構上設計標準的電機安裝板與聯軸器防護罩。
- 人機交互界面:控制柜面板布局需符合人機工程學,急停按鈕、模式選擇開關、指示燈等配件的安裝孔位需在機柜零件圖上精確標出。
一款先進的智能化堅果去殼機的開發,是精密機械結構、自動化執行機構與智能感知控制系統深度融合的產物。通過嚴謹的CAD工程圖設計與Pro/E三維數字化建模,不僅能準確表達設計意圖,指導生產加工,更能通過虛擬仿真提前發現并解決潛在問題,大幅縮短研發周期,提升設備可靠性與智能化水平,為堅果加工產業升級提供高效、清潔的裝備解決方案。
最新產品